| 14ビットおよび16ビットの解像度 | 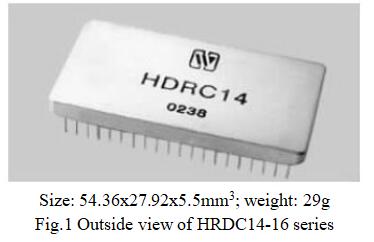 |
| 4'および2'の精度 | |
| 2VA出力駆動容量 | |
| 低半径ベクトル誤差(0.03%) | |
| 過電圧保護と短絡保護を装備 | |
| テレメトリ出力ピンを備えています | |
| 外部調整の必要なし | |
| AD社のDRC1745/1746製品とのピン間互換性 |
ドライブシンクロ/リゾルバー;アンテナシステム;サーボシステム;統合
シミュレーター。
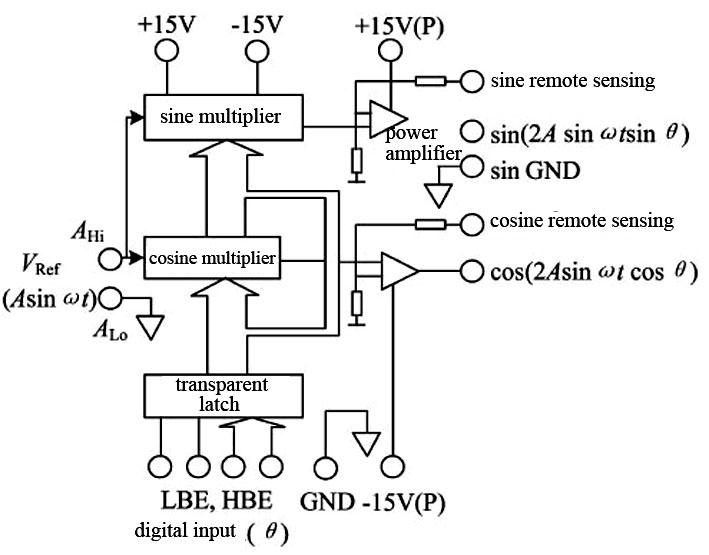
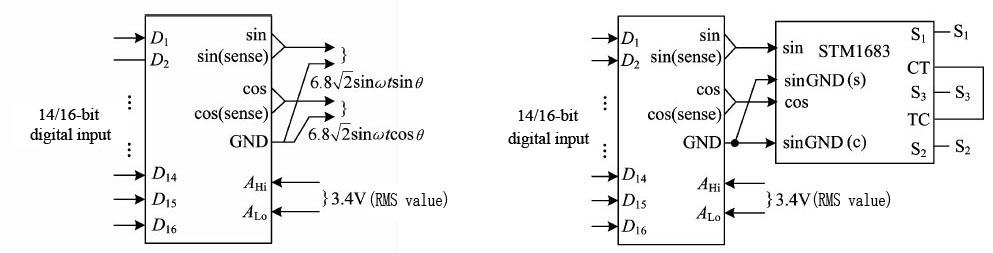
3.HDRC14-16シリーズデジタル-シンクロコンバーターまたはデジタル-レゾルバーコンバーターの説明
HDRC14 / HDRC16シリーズ製品は、デジタルからレゾルバへのコンバーターまたは
ハイブリッド集積回路構造のデジタルからシンクロへのコンバータ
負荷は、誘導負荷、容量性負荷、または抵抗性負荷のいずれかになります。 | |
過電流および過電圧保護を備えています。の出力 | コンバーターはレゾルバを直接駆動でき、また 外部トランスを接続してシンクロのトランスを制御します。 HDRC14/HDRC16シリーズ製品のユニークなパフォーマンスは正弦波と |
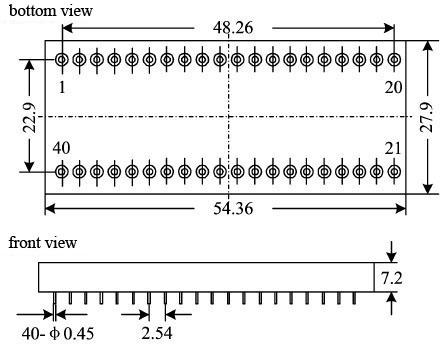
コサインテレメトリ出力。したがって、長距離ドライブを実行するとき、それはすることができます変換された出力信号の精度を確保します。 | HDRC14 / HDRC16シリーズ製品には、内部ラッチが装備されています。 ハイビットイネーブルエンドHBEとロービットイネーブルエンドを介して制御されます LBE、データバスとの接続が便利です。 HDRC14 / HDRC16シリーズ製品は、デュアルインライン40ピンメタルパッケージです。 |
4. HDRC14-16シリーズデジタル-シンクロコンバーターまたはデジタル-レゾルバーコンバーターの電気的性能(表1、表2) | ||||||
表1定格条件と推奨動作条件 | 絶対最大定格値 | 供給電圧Vs:±7.25V | 論理電圧VL:+ 5.5V | 保管温度範囲:-65℃〜+150℃ | ||
推奨される操作 | 条件 | 供給電圧Vs:±5V | 論理電圧VL:+ 5V | |||
基準周波数f:400Hz〜2000Hz | - | 14 | - | 16 | 動作温度範囲TA:-55℃〜125℃ | |
表2電気的特性 | - | 特性 | - | ±2 | HDRC14 | |
HDRC16 | 単位 | 備考 | 最小 | 最大 | V | |
最小 | 最大 | 解像度 | 少し | 角度エラー | V | |
±5.3 角度分 | アナログリファレンス入力 | 3.23 | 3.57 | 3.23 | V | |
3.57 | - | 25 | - | 25 | レゾルバの信号出力 | |
6.46 | 0 | 7.14 | 0 | 6.46 | 7.14 | |
利得 | (VRef-Vo) | - | 1.999 | - | kΩ | |
2.001 | - | 1.999 | - | 2.001 | Ω | |
出力ゲインの温度係数 | - | 2 | - | 2 | VA | |
PPM/℃ | - | アナログ入力周波数範囲 | - | 2.62.6 | - | |
2.62.6 | kHz | アナログ入力インピーダンス | - | |||









 (2)脈動電源
(2)脈動電源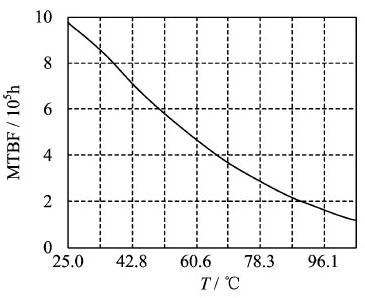
Zu003d出力負荷 | (3)消費電力の例 | 消費電力に影響を与える多くの要因があります、 | 次の4つの例では、一般的な負荷と最悪のデジタル角度を使用します | 状態(45º)。これらの例は、脈動する力を使用することを説明することができます | 消費電力を削減できます。 | ここでの動作条件は次のとおりです。 | VDCu003d±15V; Vp u003d 3V; Vout u003d 9.6V(RMS値は6.8V); VAC u003d 9.6V(約 | Voutに等しい); I1 u003d 292mA(1.4VAを必要とする負荷に相当)。 |
1 | ①DC電源、θu003d45º、抵抗負荷 | ②例1と同様、電源は3V脈動電源です。 | 13 | 脈動電力を使用する場合、内部消費電力は1.75W削減され、それらの比率は3.2:1です。 | ③DC電源、θu003d45º、純粋な誘導負荷 | 28 | ④例3と同様、電源は3V脈動電源です。 | (4)ロード |
2 | D2 | 次に、負荷の計算方法を説明します。コントロール用 | 14 | シンクロのトランス、まずZsoの値を取得する必要があります、 | これは通常、シンクロメーカーによって提供されます。制御 | 29 | V- | 負荷は次のとおりです。 |
3 | D3 | ここで、V2は信号電圧のRMS値です。 | 15 | 出力ピンに出力トランスを追加する場合は、計算された電力に0.25VAを追加する必要があります。 | たとえば、信号のRMS値が90V、400Hzであると仮定し、次のように使用します。 | 30 | V+ | の制御トランスを駆動するHRDC14外部出力トランス |
4 | D4 | シンクロ。外部トランスの使用は、のRMS値を増やすことです。 | 16 | 制御に必要な6.8V〜90VのHRDC14の電圧出力 | 変成器。 | 31 | シンクロの制御トランスの場合、Zsoは700+j4900です。 | したがって、制御トランスを使用する場合の負荷は次のとおりです。 |
5 | D5 | ;次に、変圧器の追加の消費電力を加えると、総消費電力は1.48VAになります。 | この方法は、ロータリーを使用するアプリケーションにも使用できます。 | NC | 制御トランスですが、3/4を掛ける必要はありません。 | 32 | LE | 6. HDRC14-16シリーズデジタル-シンクロコンバーターまたはデジタル-レゾルバーコンバーターのMTBF曲線(図3) |
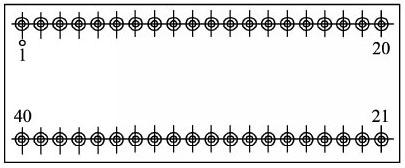
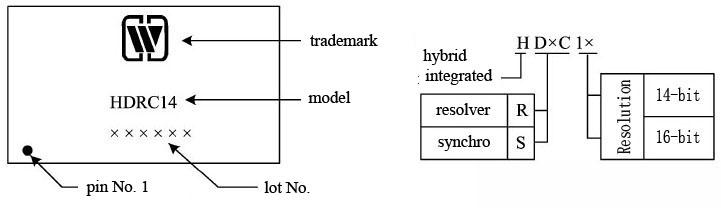
6 | D6 | 図3MTBF-温度曲線 | 21 | (注:GJB / Z299B-98によると、良好な地盤状態が想定されています) | 7. HDRC14-16シリーズデジタル-シンクロコンバーターまたはデジタル-レゾルバーコンバーターのピン指定(図4、表3) | 33 | HE | 図4ピンの概略図(底面図) |
7 | D7 | 表3ピンの機能説明 | 22 | ピン | シンボル | 34 | 働き | ピン |
8 | D8 | シンボル | 23 | 働き | ピン | 35 | シンボル | 働き |
9 | D9 | D1(MSB) | 24 | 1番目のビットのデジタル入力 | D13 | 36 | 13ビットデジタル入力 | GNDA |
10 | アナロググラウンド | 2番目のビットのデジタル入力 | 25 | D14(LSB) | 14ビットデジタル入力 | -15V電源 | NC | 3ビットデジタル入力 |
11 | D15 | 15ビットデジタル入力 | 26 | +15V電源 | 4番目のビットのデジタル入力 | |||
12 | D16(LSB) | 16ビットデジタル入力 | 27 | V1 + | +5V電源 |
コサイン出力端 | 高8ビット選択が有効 | 7ビットデジタル入力 | Vsin | サイン出力端 | RLo | |
1 | 基準入力の下限 | 7 | 8ビットデジタル入力 | 13 | V + P | |
2 | +15V脈動電力 | 8 | RHi | 基準入力の上限 | 9ビットデジタル入力 | |
3 | V-P | 9 | -15Vの脈動電力 | 15 | 場合 | |
4 | ケースグラウンド | 10 | D10 | 10ビットデジタル入力 | cosテレメトリ | |
5 | コサインテレメトリエンド | 11 | 37-40 | |||
6 | 接続なし | 12 | D11 |
罪のテレメトリ | サインテレメトリエンド |
 | |
必須の場合、「HBE」と「LBE」は開回路にすることができます。 | すべてのデジタル入力ピンの内部には27kΩのプルアップ抵抗があります。 | 5V電源に接続されているため、ラッチ入力に50μAの電流が流れる場合 | ピンが外部デジタルドライブに漏れても、すべての入力を保証できます | TTLレベルと互換性のあるピンは安定しています。 | 8. HDRC14-16シリーズデジタル-シンクロコンバーターまたはデジタル-レゾルバーコンバーターの重量値の表(表4) | 表4重量値の表 | ビット/(MSB) | 角度 |
ビット/(MSB) | 角度 | ビット/(MSB) | 角度 | 180.000 0 | 2.812 5 | 0.043 9 | 90.000 0 |

Subscribe to our weekly newsletter and receive exclusive offers on products you love!
 X
X




















 Gold Supplier
Gold Supplier